DCMD_I2C_SENDS
QNX SDP8.0Customizing a BSPConfigurationDeveloper
#include <hw/i2c.h>
#define DCMD_I2C_SENDS __DIOT (_DCMD_I2C, 11, i2c_send_t)
The arguments to devctl() are:
| Argument | Value |
|---|---|
| filedes | A file descriptor that you obtained by opening the device. |
| dcmd | DCMD_I2C_SENDS |
| dev_data_ptr | A pointer to a i2c_send_t, followed by additional data |
| n_bytes | sizeof(i2c_send_t),
plus the size of the additional data |
| dev_info_ptr | NULL |
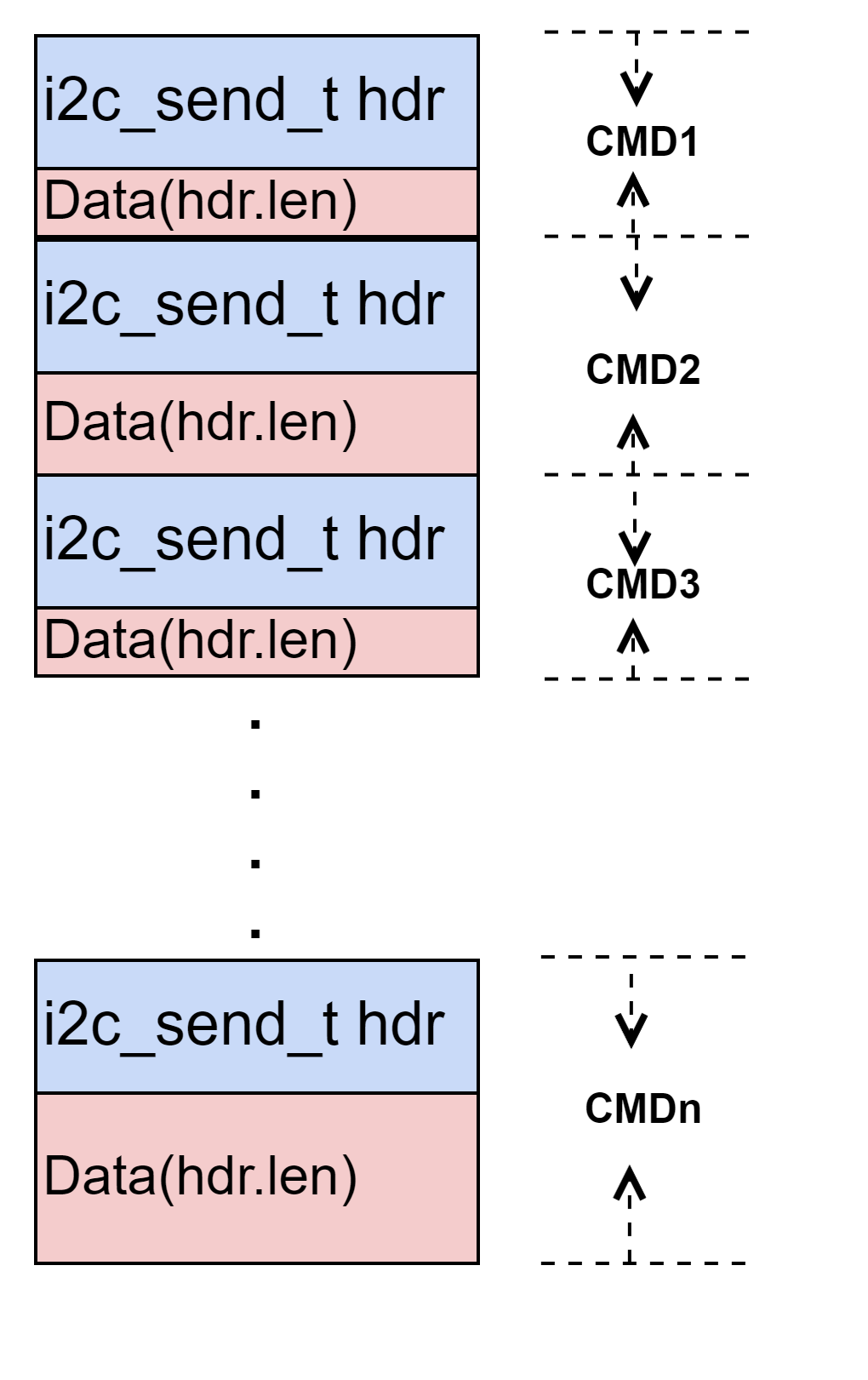
The DCMD_I2C_SENDS command executes multiple send transactions atomically. The atomic property of this command guarantees that another client application won't interrupt the transaction by accessing the I2C bus. This command blocks until the transaction is complete.
- Input
- i2c_send_t — the message header:
typedef struct { i2c_addr_t slave; /* slave address */ uint32_t len; /* length of send data in bytes */ uint32_t stop; /* send stop when complete? (0=no, 1=yes) */ } i2c_send_t; - uint8_t[] — the data buffer
- i2c_send_t — the message header:
- The messages sent from the client to libi2c has
the following DCMD_I2C_SENDS input data structure:
- Output
- None.
If an error occurs, the command returns:
- EIO
- The master send failed. The causes include: bad slave address, bad bus speed, bus is busy.
- EFAULT
- An error occurred while accessing the data buffer.
- EINVAL
- Bad message format.
- ENOMEM
- Insufficient memory.
- EPERM
- The master is locked by another connection.
A code example of using DCMD_I2C_SENDS:
/* This sample code is accessing device /dev/i2c0. * It sends 2 commands to slave device 0x20. * All the transactions are atomic. */ #include <stdio.h> #include <stdlib.h> #include <string.h> #include <errno.h> #include <unistd.h> #include <devctl.h> #include <fcntl.h> #include <hw/i2c.h> #define CMD_NUM 2 char *devname = "/dev/i2c0"; unsigned bus_speed = 0; int main(int argc, char *argv[]) { int fd; int status; fd = open(devname, O_RDWR); if (fd < 0) { fprintf(stderr, "open(%s): %s\n", devname, strerror(errno)); exit(-1); } if (bus_speed) { if ((status = devctl(fd, DCMD_I2C_SET_BUS_SPEED, &bus_speed, sizeof(bus_speed), NULL))) { errno = status; perror("devctl(BUS_SPEED)"); exit(-1); } } iov_t siov[2*CMD_NUM]; i2c_send_t cmd[CMD_NUM] = {{.len = 1, .slave.addr = 0x20, .slave.fmt = I2C_ADDRFMT_7BIT, .stop = 1}, {.len = 3, .slave.addr = 0x20, .slave.fmt = I2C_ADDRFMT_7BIT, .stop = 1} }; uint8_t data0 = 0x0c; uint8_t data1[3] = {0x04, 0x0c, 0x04}; SETIOV(&siov[0], &cmd[0], sizeof(i2c_send_t)); SETIOV(&siov[1], &data0, sizeof(data0)); SETIOV(&siov[2], &cmd[1], sizeof(i2c_send_t)); SETIOV(&siov[3], &data1, sizeof(data1)); if ((status = devctlv(fd, DCMD_I2C_SENDS, 2*CMD_NUM, 0, siov, NULL, NULL))) { errno = status; perror("MASTER_SEND"); exit(-1); } exit(0); }
Page updated: