Controller Area Network (CAN) DDK
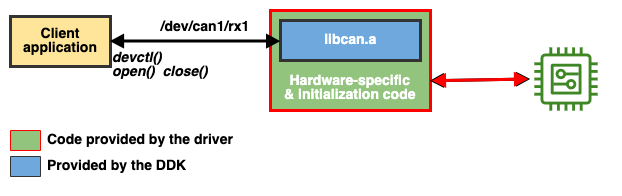
CAN drivers are implemented as standalone executable binaries that statically link with libcan.a and call CAN functions. The libcan library creates a resource manager for each RX (receiver) or TX (transmitter) device. The resource manager is single-threaded, and all callbacks are executed in the same thread, which makes locking unnecessary unless the driver implementation starts a thread that uses resources that are common to the callback functions.
To start developing with CAN drivers, install the QNX SDP 8.0 Connectivity - CAN (com.qnx.qnx800.target.connectivity.can) package from the QNX Software Center, which contains the static library, libcan.a, and the two C language header files, libcan.h and can_dcmd.h.
Page updated: