There's one more piece of the puzzle we've been missing. Most PICs can be programmed to operate in level-sensitive or edge-sensitive mode.
In level-sensitive mode, the interrupt line is deemed to be asserted by the PIC while it's in the "on" state. (This corresponds to label "1" in the diagram below.)
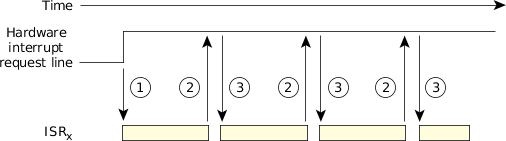 Figure 1. Level-sensitive interrupt assertion.
Figure 1. Level-sensitive interrupt assertion.We can see that this would cause the problem described above with the floppy controller example. Whenever the ISR finishes, the kernel tells the PIC, "Okay, I've handled this interrupt. Tell me the next time that it gets activated" (step 2 in the diagram). In technical terms, the kernel sends an End Of Interrupt (EOI) to the PIC. The PIC looks at the interrupt line and if it's still active would immediately re-interrupt the kernel (step 3).
We could get around this by programming the PIC into edge-sensitive mode. In this mode, the interrupt is noticed by the PIC only on an active-going edge.
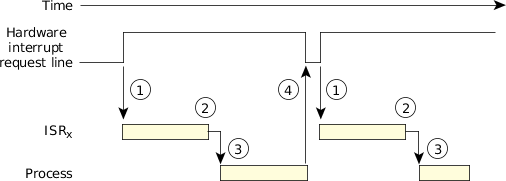 Figure 2. Edge-sensitive interrupt assertion.
Figure 2. Edge-sensitive interrupt assertion.Even if the ISR fails to clear the source of the interrupt, when the kernel sends the EOI to the PIC (step 2 in the diagram), the PIC wouldn't re-interrupt the kernel, because there isn't another active-going edge transition after the EOI. In order to recognize another interrupt on that line, the line must first go inactive (step 4), and then active (step 1).
Well, it seems all our problems have been solved! Simply use edge-sensitive for all interrupts.
Unfortunately, edge-sensitive mode has a problem of its own.
Suppose your ISR fails to clear the cause of the interrupt. The hardware would still have the interrupt line asserted when the kernel issues the EOI to the PIC. However, because the PIC is operating in edge-sensitive mode, it never sees another interrupt from that device.
Now what kind of bozo would write an ISR that forgot to clear the source of the interrupt? Unfortunately it isn't that cut-and-dried. Consider a case where two devices (let's say a SCSI bus adapter and an Ethernet card) are sharing the same interrupt line, on a hardware bus architecture that allows that. (Now you're asking, "Who'd set up a machine like that?!?" Well, it happens, especially if the number of interrupt sources on the PIC is in short supply!) In this case, the two ISR routines would be attached to the same interrupt vector (this is legal, by the way), and the kernel would call them in turn whenever it got an interrupt from the PIC for that hardware interrupt level.
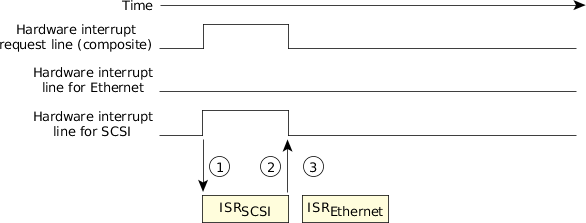 Figure 3. Sharing interrupts: one at a time.
Figure 3. Sharing interrupts: one at a time.In this case, because only one of the hardware devices was active when its associated ISR ran (the SCSI device), it correctly cleared the source of the interrupt (step 2). Note that the kernel runs the ISR for the Ethernet device (in step 3) regardless—it doesn't know whether the Ethernet hardware requires servicing or not as well, so it always runs the whole chain.
But consider this case:
 Figure 4. Sharing interrupts: several at once.
Figure 4. Sharing interrupts: several at once.Here's where the problem lies.
The Ethernet device interrupted first. This caused the interrupt line to be asserted (active-going edge was noted by the PIC), and the kernel called the first interrupt handler in the chain (the SCSI disk driver; step 1 in the diagram). The SCSI disk driver's ISR looked at its hardware and said, "Nope, wasn't me. Oh well, ignore it" (step 2). Then the kernel called the next ISR in the chain, the Ethernet ISR (step 3). The Ethernet ISR looked at the hardware and said, "Hey! That's my hardware that triggered the interrupt. I'm going to clear it." Unfortunately, while it was clearing it, the SCSI device generated an interrupt (step 4).
When the Ethernet ISR finished clearing the source of the interrupt (step 5), the interrupt line is still asserted, thanks to the SCSI hardware device. However, the PIC, being programmed in edge-sensitive mode, is looking for an inactive-to-active transition (on the composite line) before recognizing another interrupt. That isn't going to happen because the kernel has already called both interrupt service routines and is now waiting for another interrupt from the PIC.
In this case, a level-sensitive solution would be appropriate because when the Ethernet ISR finishes and the kernel issues the EOI to the PIC, the PIC would pick up the fact that an interrupt is still active on the bus and re-interrupt the kernel. The kernel would then run through the chain of ISRs, and this time the SCSI driver would get a chance to run and clear the source of the interrupt.
The selection of edge-sensitive versus level-sensitive is something that will depend on the hardware and the startup code. Some hardware will support only one or the other; hardware that supports either mode will be programmed by the startup code to one or the other. You'll have to consult the BSP (Board Support Package) documentation that came with your system to get a definitive answer.