As described earlier in this chapter, there's a 153-nanosecond (ns) discrepancy between the request and what the hardware can do. The kernel timer manager is invoked every .999847 ms. Every time a timer fires, the kernel checks to see if the timer is periodic and, if so, adds the number of nanoseconds to the expected timer expiring point, no matter what the current time is. This phenomenon is illustrated in the following diagram:
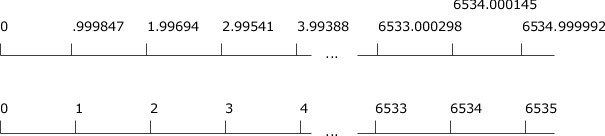 Figure 1. Actual and expected timer expirations.
Figure 1. Actual and expected timer expirations.The first line illustrates the actual time at which timer management occurs. The second line is the time at which the kernel expects the timer to be fired. Note what happens at 6534: the next value appears not to have incremented by 1 ms, thus the event 6535 won't be fired!
For signal frequencies, this phenomenon is called a beat. When two signals of various frequencies are "added," a third frequency is generated. You can see this effect if you use your camcorder to record a TV image. Because a TV is updated at 60 Hz, and camcorders usually operate on a different frequency, at playback, you can often see a white line that scrolls in the TV image. The speed of that line is related to the difference in frequency between the camcorder and the TV.
In this case we have two frequencies, one at 1000 Hz, and the other at 1005.495 Hz. Thus, the beat frequency is 1.5 micro Hz, or one blip every 6535 milliseconds.
This behavior has the benefit of giving you the expected number of fired timers, on average. In the example above, after 1 minute, the program would have received 60000 fired timer events (1000 events /sec * 60 sec). If your design requires very precise timing, you have no other choice but to request a timer event of .999847 ms and not 1 ms. This can make the difference between a robot moving very smoothly or scratching your car.