The io-char library manages the flow of data between an application and the device driver. Data flows between io-char and the driver through a set of memory queues associated with each character device.
Three queues are used for each device. Each queue is implemented using a first-in, first-out (FIFO) mechanism.
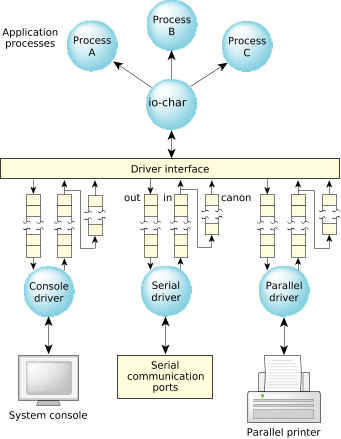 Figure 1. Device I/O in the QNX Neutrino RTOS.
Figure 1. Device I/O in the QNX Neutrino RTOS.Received data is placed into the raw input queue by the driver and is consumed by io-char only when application processes request data. (For details on raw versus edited or canonical input, see the section “Input modes” later in this chapter.)
Interrupt handlers within drivers typically call a trusted library routine within io-char to add data to this queue—this ensures a consistent input discipline and minimizes the responsibility of the driver (and effort required to create new drivers).
The io-char module places output data into the output queue to be consumed by the driver as characters are physically transmitted to the device. The module calls a trusted routine within the driver each time new data is added so it can “kick” the driver into operation (in the event that it was idle). Since output queues are used, io-char implements write-behind for all character devices. Only when the output buffers are full will io-char cause a process to block while writing.
The canonical queue is managed entirely by io-char and is used while processing input data in edited mode. The size of this queue determines the maximum edited input line that can be processed for a particular device.
The sizes of these queues are configurable using command-line options. Default values are usually more than adequate to handle most hardware configurations, but you can “tune” these to reduce overall system memory requirements, to accommodate unusual hardware situations, or to handle unique protocol requirements.
Device drivers simply add received data to the raw input queue or consume and transmit data from the output queue. The io-char module decides when (and if) output transmission is to be suspended, how (and if) received data is echoed, etc.